|
|
Practical
Linear Algebra
A Geometry Toolbox, Second edition
by Gerald
Farin & Dianne
Hansford
published by A
K Peters, Ltd., January 2005
384
pages, ISBN: 1-56881-234-5
|
|
Errata
If
you find errors in the text or figures, please email dianne@farinhansford.com!
Updated: 22 July 2013
| Chapter
1: |
Descartes'
Discovery |
Posted |
| page
10 |
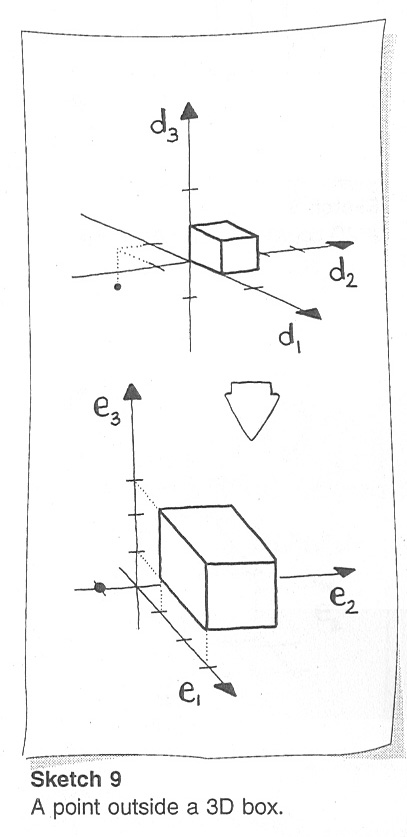
Sketch
1.9 accompanying Example 1.3 is incorrect. Please see the
Sketch below. (This was correct in the first edition -- The
Geometry Toolbox.)
The correct
Example to accompany the Sketch 1.9 in the text is as follows.
Suppose that (u1, u2, u3) = (4/3, 3/2, 3/4). (That is our
guess examining at the sketch.) Also, suppose that min = (0,1,0)
and max = (1/2, 2. 1). Then (x1, x2, x2) = (2/3, 5/2, 3/4).
Found
by Marco Frontini, Italy
|
9/9/05 |
| |
The "corrected" solution given above for the sketch in the book seems to be incorrect!
(u1, u2, u3) = (0.75, 2.5, 0.5) and (x1, x2, x2) = (1.5, 1.5, 0.5). |
3/6/13 |
| page 14, Sketch 2.1 |
The point labeled as [-2, 2] should be [2,-2]. |
7/22/13 |
|
Chapter
2:
|
Here
and There: Points and Vectors in 2D
|
Posted
|
| page
19 |
Equation
(2.5) should be || kv || = |k| || v ||.
Found by Ismail Keskin
|
7/6/08 |
| page
27 |
Second
equation in page: the term k in the denominator should be |k|.
This equation holds for nonzero k and w.
Found by Ismail Keskin |
7/6/08 |
|
page 28
|
theta
= acos(s)
s was
defined in (2.14) as s = v . w, but here s should be s = v.w
/ (||v||||w||)
|
4/28/08
|
| Chapter
4: |
Changing
Shapes: Linear Maps in 2D |
Posted |
| page
61 |
Sketch
4.2: All labels v should be replaced by u
Found by
Ismail Keskin |
7/6/08 |
page
68
mid-page |
Incorrect:
e2'=[sin a, cos a]
Correct: e2'=[-sin a, cos a]
Found by: Hiroshi Ashikaga, MD NIH/NHLBI |
2/21/05 |
| page
72 |
Exclude
the zero vector for [a_1, a_2]^T in the definition of the
matrix [a_1, ca_2; a_2, ca_2]. As one linear map, this would
not be a parallel projection.
Found by Marco Frontini, Italy |
5/1/05 |
| page
79 |
Figure
4.12: the reflection in the top and bottom sequence is about
the e1 axis. The reference to the Figure, in Example 4.7 should
state that the reflection is about the e1 axis.
Found by Ismail Keskin |
7/6/08 |
|
Chapter
5:
|
2x2 Linear Systems
|
Posted
|
|
page 88
|
Just before equation (5.1), it reads "point vector equations", however it should read "vector equations"
|
3/6/13
|
| page 100 |
The linear system that has first row elements 1 and 3 is incorrect. This linear system should be
[2, 1; 0, 0] u = [3; 0] |
3/6/13 |
| page 102 |
At mid-page, the equation |a_{1,1}| < |a_{1,2}| should be |a_{1,1}| < |a_{2,1}| |
3/6/13 |
|
Chapter
6:
|
Moving
Things Around: Affine Maps in 2D
|
Posted
|
|
page 115
|
In Example
6.4, the matrix A should be [-1, 0; 0, -1].
Found by Daniel Kurtz, Northeastern Univ., Boston
|
4/17/07
|
| Chapter
7: |
Eigen
Things |
Posted |
page
125
after (7.2) |
Replace
"must be a projection" with "must be singular"
Found by: J. Dixon |
1/30/06 |
| page
131 |
The last
sentence is wrong. A counterexample is given by the matrix
[[0,1],[0,0]]. It has two zero eigenvalues but it is not the
zero matrix. Its rank is one.
Found by: J. Dixon
|
1/30/06 |
| page 134 |
Discussion of positive definite matrix should be expanded. (See PLA third edition)
If A is a symmetric matrix, then A_s = A.
A key concept is that these matrices lend themselves to numerically stable and efficient algorithms. |
7/22/13 |
| page
138, first paragraph |
The
singular values of A are the square roots of lambda_1� and lambda_2�.
Found by: J. Dixon
Let the singular values be sigma_1 and sigma_2. The condition number of A is sigma_1/sigma_2. |
1/30/06
7/21/13 |
| Chapter
8: |
Breaking
It Up: Triangles |
Posted |
page
142
line 2 |
Incorrect:
finite element analysis (FEM)
Correct: finite element method (FEM)
Found by: Hiroshi Ashikaga, MD NIH/NHLBI |
3/6/05 |
| Chapter
9 |
Conics |
Posted |
| page 162 |
At the bottom of the page, the expression for "c" is incorrect. It should be c = v^TAv - d |
3/6/13 |
page
164,
exercise 5 |
The first
term in the equation should be x_1 rather than x_2
Found by: A. Sicherer-Roetman, Maritime Research Institute
Netherlands
|
8/11/08 |
| Chapter
12: |
Linear
Maps in 3D |
Posted |
page
204
mid-page |
Incorrect:
left-hand-side of matrix equation reads [v_1, v_2, v_3]^T
Correct: [v_3, v_2, v_1]^T
Found by: Hiroshi Ashikaga, MD NIH/NHLBI
|
3/6/05 |
| page 213, 2nd paragraph |
"triple Section" should be "Section" |
7/22/13 |
| page 213, 1st paragraph |
"A linear map A will change that volume to that of the skew box ..."
If the linear map is a rigid body motion, such as a rotation or uniform scale, then the a_i are orthogonal. |
7/22/13 |
| Chapter
13: |
Affine
Maps in 3D |
Posted |
page
230
line 3 |
Incorrect:
n[q - x] = 0
Correct: n[q-x'] = 0
Found by: Hiroshi Ashikaga, MD NIH/NHLBI |
3/6/05 |
| Chapter
14: |
General
Linear Systems |
Posted |
| page 250 |
The last linear system displayed on the page has "63" in the right hand side vector. This should be a "3". |
3/6/13 |
| page
254 |
Example
14.6: right-hand side should be [7, -1, 0]^T
Found by: Bill Petzke |
10/29/06 |
| page
260 |
The algorithm
on this page can be tricky to follow. We have made an effort
to write the book without summations, but in this case they
might have made the algorithm easier to follow.
In the
three equations, notice that one subscript for each u and
l term of the equation runs from 1 up to k-1 or k-1 down to
1. When k=1, these elements do not exist. Look to the last
term to determine how many terms will be in these equations.
For those
familiar with summations, the first equations would be written
u_k,k = a_k,k - Sum (for m=1 to m=k-1) [l_k,m * u_m,k]
Found
by: A. Sicherer-Roetman, Maritime Research Institute Netherlands
|
8/26/08 |
| page
261 |
To make
the example on this page clearer, and in light of the errata
from the previous page, we could make it clear how two entries
are computed.
u_1,1
= a_1,1 = 2
u_1,3 = a_1,3 = 4
Found by: A. Sicherer-Roetman, Maritime Research Institute
Netherlands
|
8/26/08 |
| Chapter 15: |
General Linear Spaces |
Posted |
| page 271 |
The last displayed equation should have minus signs rather than plus signs. The part that reads
<b_1,b_1> + ... + <u, b_r> should read <b_1,b_1> - ... - <u, b_r>
|
3/1/13 |
| page 277 |
The roots to a degree 4 polynomial are too hard to find by hand. Ignore this exercise if you do not have software. (The solution is incorrect. See below for an explanation.) |
7/21/13 |
| Chapter
16: |
Numerical
Methods |
Posted |
page
290
footnote 1 |
Incorrect:
"...that the sum..."
Correct: "...than the sum..."
Found by: Hiroshi Ashikaga, MD NIH/NHLBI |
3/6/13 |
| page 282 |
The sentence reading "For any n-vector ..." is a bit misleading. This statement is true for a_j where j=1,...,i. |
3/6/13 |
| page 283 |
The last line of the algorithm, the definition of \bar a_j is missing a transpose sign. |
3/6/13 |
| page 284 |
The sentence "Notice that a_3 ..." is incorrect. The vector a_3 is not changed because it is in the plane about which the reflection is occuring, thus since the Householder matrix has the involutary property, a_3 is not changed. |
|
| page 292, Figure 16.3 |
The vectors should be labeled with boldface r_i |
7/22/13 |
| Chapter
17 |
Putting
Lines Together: Polylines and Polygons |
Posted |
| page 302, Sketch 17.9 |
The top object is not a rhombus because it is not equilateral. |
7/21/13 |
| page
308 |
"a
another way to check the area" -- omit "a"
Definition
of n: u_2 listed twice, one should be u_3
(u_2 + u_3 + ... u_{n-2}). In denominator also.
Found
by: A. Sicherer-Roetman, Maritime Research Institute Netherlands
|
8/29/08 |
| page
309, example 17.3 |
Incorrect
u_2 and u_3 and normal n
Correct: u_2 = [1, -1, 1]^T u_3=[-1,1,1]^T
n=[0,0,1]^T
Found by: Daniel Kurtz, Northeastern Univ., Boston
|
5/17/07 |
| |
|
|
| Appendix
B |
Selected
Problem Solutions |
Posted |
| page
344, solution to problem 10 |
Solution
for u^{perp} incorrect.
w - u = [3 ,2]^T - [1/2, -1/2]^T = [5/2, 5/2]^T
Found by Kyle Monroe, Digipen Institute of Technology |
9/13/06 |
| page
345, solution to problem 10 |
The line
equation is incorrect. A correct line equation: l(t) = p +
t (q - p)
Found by Aaron Arlet, Digipen Institute of Technology
|
9/21/06 |
| page
345, solution to problem 11 |
The
point r is incorrect, it should be r=[2,3/2]. (See problem 10
above.)
Thus m(t) = [2, 3/2]^T + t [-1, 4]^T
Found by Chris Tallman, Digipen Institute of Technology |
9/21/06 |
| page 349, solution to problem 3 |
The singular values of a matrix A are the square root of the the eigenvalues of A^TA.
The condition number of A is sigma_1/sigma_2, where sigma_i are the singular values of A.
The eigenvalues in the solution should be labeled lambda'_i, then sigma_1 = sqrt(lambda'_1) = 1.45 and sigma_2 = sqrt(lambda'_2) = 0.69.
The condition number of A is 1.45/0.69 = 2.10. |
7/21/13 |
page
351,
solution to Chapter 9, problem 1 |
The
matrix should be A = [1, -1; -1,1]. The rest of the solution
is correct.
Found by: A. Sicherer-Roetman, Maritime Research Institute Netherlands
|
8/11/08 |
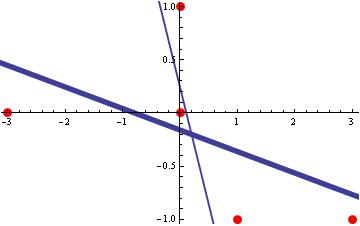
page
360,
solution to Chapter 14, problem 4 |
The solution
given is incorrect; it should be x_2 = -0.202x_1 - 0.16.
We should
have taken our own advice and sketched it! Here is a plot
of the input points, the incorrect solution (thin line) and
correct solution (thick line).
Found
by: A. Sicherer-Roetman, Maritime Research Institute Netherlands
|
8/29/08 |
| page 361, solution to Chapter 15, problem 11 |
Elementary row operations change the eigenvalues. A diagonalization method, such as SVD, can be used. (See PLA 3rd edition.) |
7/21/13 |
| page
364, solution to Chapter 17, problem 8 |
The correct
normal is n = [0,0,1]^T. See Example 17.3 and its erratum
above.
Found
by: A. Sicherer-Roetman, Maritime Research Institute Netherlands
|
8/29/08 |
| Index |
Instructor's Exercise Solutions |
Posted |
| Chapter 4, Exercise 4 |
The solution does not match the exercise question. |
7/21/13 |
| |
Index |
Posted |
| Chapter 4, Exercise 4 |
Incorrect: symmetric matrix, 125, 282
Correct: symmetric matrix, 63, 125, 282 |
3/6/05 |
|
| |
|
|
{kind=link}